PENGEMBANGAN MECHATRONIC DESIGN DAN MOTION CONTROL EKSOSKELETON ADAPTIF BERBASIS EMG UNTUK REHABILITASI ANGGOTA GERAK ATAS PASIEN PASCA STROKE
Rehabilitasi pasien pasca stroke menjadi tantangan besar dalam dunia medis, terutama dalam meningkatkan fungsi motorik anggota gerak atas. Teknologi eksoskeleton berbasiselectromyography (EMG) menjadi solusi inovatif untuk mendukung terapi yang lebih presisi dan adaptif terhadap kondisi pasien. Penelitian ini bertujuan untuk mengembangkan desain mekatronik dan sistem kontrol eksoskeleton adaptif berbasis EMG guna meningkatkan efektivitas rehabilitasi pasien pasca stroke. Penelitian ini akan dilakukan dengan tahapan mencakup perancangan awal eksoskeleton,simulasi biomekanik, pengembangan sistem kontrol berbasis machine learning, serta validasi melalui eksperimen laboratorium dan uji performa pada pasien pasca stroke. Target luaran penelitian ini meliputi publikasi jurnal internasional terindeks Scopus (Q2), proposal Program Kreativitas Mahasiswa (PKM), serta pengajuan paten sederhana terkait desain eksoskeleton.Hasil penelitian ini juga akan disusun dalam bentuk buku referensi untuk mendukung pengembangan ilmu di bidang robotika rehabilitasi. Hasil penelitian diharapkan dapat memberikan kontribusi signifikan dalam pengembangan teknologi kesehatan berbasis eksoskeleton yang lebih terjangkau dan efisien. Inovasi ini berpotensi pasien pasca stroke dapat memperoleh terapi yang lebih optimal, sementara tenaga medis mendapatkan alat bantu yang lebih efektif dalam rehabilitasi pasien.
Rumusan Masalah
Penelitian ini berfokus pada pengembangan dan optimalisasi desain eksoskeleton adaptif untuk rehabilitasi anggota tubuh atas pasien pasca stroke dengan mempertimbangkan konfigurasi gerakan, evaluasi kinerja mekanis, serta penerapan machine learning berbasis sinyal EMG guna meningkatkan efektivitas terapi rehabilitasi.
Tujuan Khusus Penelitian
-
Mengembangkan sistem pendukung keputusan dalam perancangan eksoskeleton adaptif yang mampu menyesuaikan kebutuhan pasien berdasarkan antropometri, melalui evaluasi simulasi pembebanan dan pengujian kinerja mekanis untuk mengoptimalkan struktur dan material eksoskeleton.
-
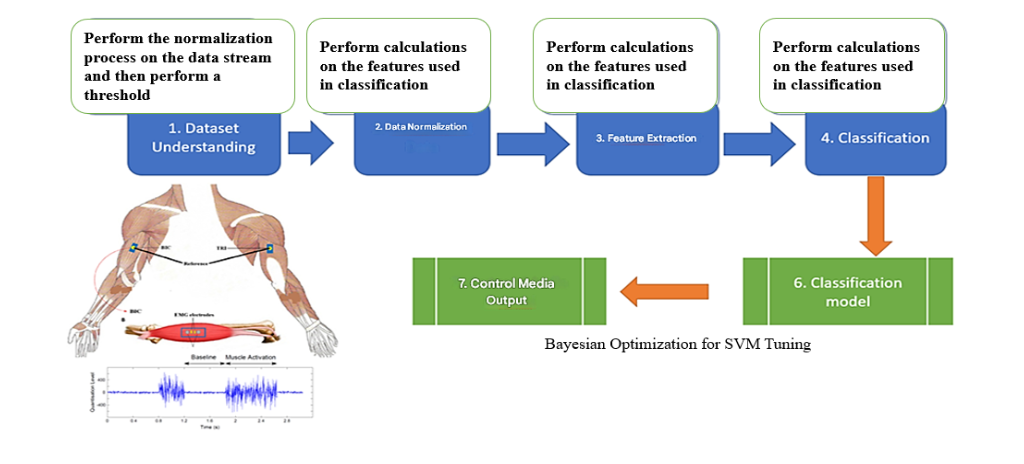
Mengimplementasikan machine learning berbasis sinyal EMG untuk mengoptimalkan kontrol gerakan eksoskeleton secara real-time sehingga meningkatkan presisi, kenyamanan, dan efektivitas terapi rehabilitasi pasien pasca stroke.
Urgensi Penelitian
Penelitian ini penting untuk mengembangkan eksoskeleton adaptif yang mampu menyesuaikan kebutuhan rehabilitasi gerakan fleksi-ekstensi pada sendi siku dan pergelangan tangan. Desain eksoskeleton disesuaikan dengan antropometri pasien melalui simulasi dan pengujian eksperimental. Penerapan machine learning berbasis sinyal EMG diharapkan dapat meningkatkan efektivitas rehabilitasi secara real-time pada pasien pasca stroke.